Program do badań układu sterująco – pomiarowego,
pracującego w sieci CANopen,
przeznaczonego do pojazdu szynowego
1
Instytut Pojazdów Szynowych „TABOR’
Data publikacji: 02-10-2008
Rail Vehicles/Pojazdy Szynowe 2008,4,14-18

STRESZCZENIE
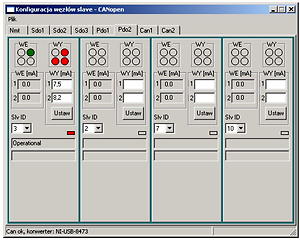
W artykule opisano program do badania układu sterująco – pomiarowego pracującego w
sieci CANopen. Wykorzystano do tego język programowania ogólnego (język C++). Przez
autorów artykułu zostały zrealizowane funkcje dotyczące sieci CANopen związane z
konfiguracją i monitorowaniem pracy w sieci oraz funkcje związane z uruchomieniem
programów badawczych. Przedstawiono przykład uruchamiania programu sterującego
hamulcem pneumatycznym pojazdu szynowego z wykorzystaniem 12 - pozycyjnego
zadajnika. Praca jest kontynuacją artykułu „Przyszłościowe współbieżne mikroprocesorowe
inteligentne systemy mechatroniczne w sterowaniu i diagnostyce pojazdów szynowych”
przedstawionego w czasopiśmie „Pojazdy Szynowe” 4/2007; 1/2008; 2/2008.
Artykuł powstał w wyniku realizacji projektu badawczego KBN 4T 12C 04929
pt.” Rozproszone współbieżne mikroprocesorowe inteligentne podsystemy mechatroniczne w
sterowaniu i diagnostyce pojazdów szynowych”.
REFERENCJE (5)
1.
Bocian S.: Przyszłościowe współbieżne mikroprocesorowe inteligentne systemy mechatroniczne w sterowaniu i diagnostyce pojazdów szynowych (1). Pojazdy Szynowe Nr 4/2007.
2.
Koncepcja układu do badania algorytmów sterujących w pojazdach szynowych. Opis układu sieciowego CANopen. Instytut Pojazdów Szynowych „Tabor” w Poznaniu, OR–9200.
3.
Koncepcja układu do badania algorytmów sterujących w pojazdach szynowych w oparciu o sieć CANopen. Program testowy algorytmów sterujących. Instytut Pojazdów Szynowych „Tabor” w Poznaniu, OR–9280.
4.
CANopen. Application Layer and Communication Profile. CiA Draft Standard 301. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, 2002, www.can-cia.org.
5.
CANopen. Device Profile for Generic I/O Modules. CiA Draft Standard 401. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, Version 2.1, 2002, www.can-cia.org.
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.