Current issue
Online first
Archive
About the Journal
Aim and Scope
Scientific Board
Editorial Board
Publisher
Reviewers
Personal Data Protection
Repository policy
Contact
AI Policy
Preprints policy
Information for authors
Paper preparation manual
Review procedures
Publishing Ethics Guidelines
Crossmark Policy
Procedures protecting authentic authorship
Plagiarism check
Copyright
Open Access Policy
Preprints policy
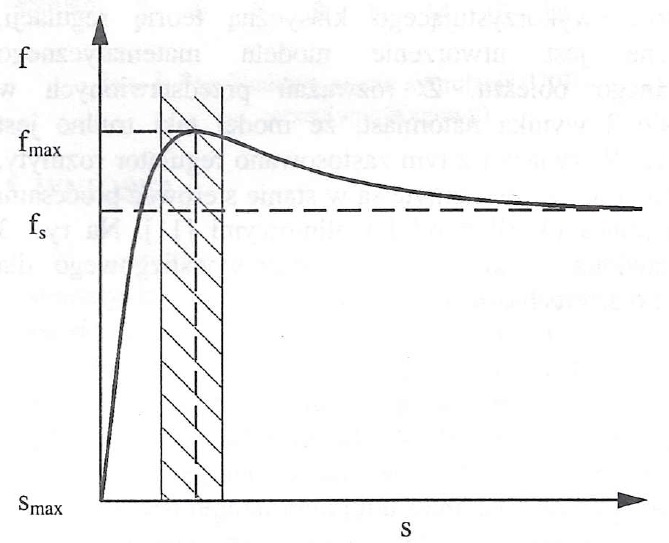
Układ sterowania rozmytego do likwidacji poślizgu przy hamowaniu
1
Instytut Pojazdów Szynowych „TABOR"
Online publication date: 2002-07-01
Publication date: 2025-05-04
Rail Vehicles/Pojazdy Szynowe 2002,3,1-4

REFERENCES (11)
1.
Caldara S., Garcia Rivera M., Poma G.: Software implementation of an anti-skidding control system for traction electrical drives based on fuzzy-identification techniques. Symposium on Power Electronics, Industrial Drives, Power Quality, Traction Systems, Capri, 1996, s. C3-19- C3-25.
2.
Gartner E.: Kraftschlufi z wischen Rad und Schiene. Schienenjaahrzeuge 1976, nr 12 , s. 417-420.
4.
Klein R.: Antilock-braking system and vehicle speed estimation using fuzzy logic. I st Embedded Computing Conference, Paris, 1996.
5.
Kumagai N.: In search of mechanism of wheel skid and wheel fiat occurrence. Japanese · Railway Engineering, 1992, nr 116, s. 16-20.
7.
Podolski J., Kacprzak J. , Mysłek J.: Zasady trakcji elektrycznej. WKŁ, Warsz awa, 1980.
8.
Rutkowska D., Piliński M., Rutkowski L.: Sieci neuronowe, algorytmy genetyczne i systemy rozmyte. PWN, Warszawa, 1997.
9.
Saumweber E.: Leistungsgrenzen kombinierter Bremssysteme. ZEV-Glas ., 1963, Ann. 98, 1974, nr 718, s. 259-265.
10.
Unsal C., Kachroo P.: (1999) Sliding mode measurement feedback control for antilock braking systems. IEEE Transactions on Control Systems Technology 1999, str. 271-281.
11.
Yager R.R, Filev D .P.: Podstawy modelowania sterowania rozmytego. WNT, Warszawa, 1995.
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
We process personal data collected when visiting the website. The function of obtaining information about users and their behavior is carried out by voluntarily entered information in forms and saving cookies in end devices. Data, including cookies, are used to provide services, improve the user experience and to analyze the traffic in accordance with the Privacy policy. Data are also collected and processed by Google Analytics tool (more).
You can change cookies settings in your browser. Restricted use of cookies in the browser configuration may affect some functionalities of the website.
You can change cookies settings in your browser. Restricted use of cookies in the browser configuration may affect some functionalities of the website.