Bieżący numer
Online first
Archiwum
O czasopiśmie
Zakres tematyczny czasopisma
Rada Programowa
Redakcja
Wydawca
Recenzenci
Ochrona danych osobowych
Polityka repozytorium
Kontakt
Polityka AI
Polityka Preprintów
Informacja dla autorów
Przygotowanie artykułu
Procedura recenzowania
Wytyczne dotyczące etyki publikowania
Polityka Crossmark
Ghostwriting i guest authorship
Prawa autorskie
Polityka Open Access
System antyplagiatowy
Układ sterowania rozmytego do likwidacji poślizgu przy hamowaniu
1
Instytut Pojazdów Szynowych „TABOR"
Data publikacji online: 01-07-2002
Data publikacji: 04-05-2025
Rail Vehicles/Pojazdy Szynowe 2002,3,1-4

STRESZCZENIE
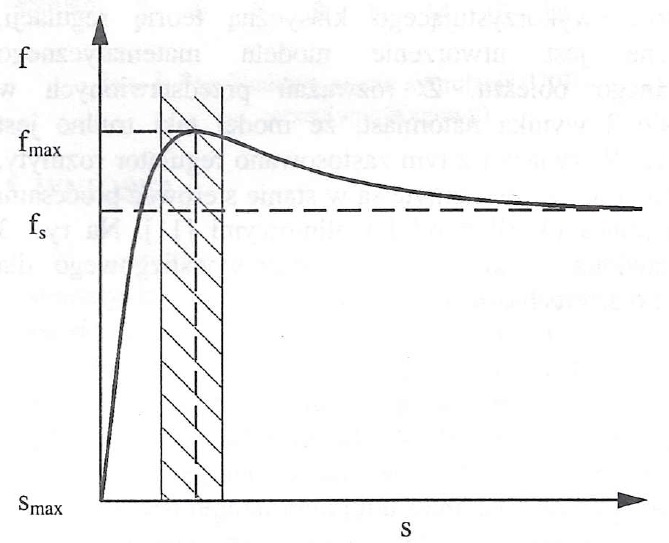
W artykule przedstawiono układ likwidacji poślizgu przy hamowaniu wykorzystujący sterowanie rozmyte. Omówiono model matematyczny hamowanego zestawu kołowego z położeniem szczególnego nacisku na część nieliniową. Opisano zadania układu likwidacji poślizgu i zaproponowano rozmyty regulator typu Mamdaniego z wykorzystaniem zmodyfikowanej bazy reguł Mac Vicara-Whelana. Zaprezentowano wyniki symulacji działania układu. Przedstawiono wnioski oraz zaproponowano następne kroki prowadzące do ulepszenia działania układu.
REFERENCJE (11)
1.
Caldara S., Garcia Rivera M., Poma G.: Software implementation of an anti-skidding control system for traction electrical drives based on fuzzy-identification techniques. Symposium on Power Electronics, Industrial Drives, Power Quality, Traction Systems, Capri, 1996, s. C3-19- C3-25.
2.
Gartner E.: Kraftschlufi z wischen Rad und Schiene. Schienenjaahrzeuge 1976, nr 12 , s. 417-420.
4.
Klein R.: Antilock-braking system and vehicle speed estimation using fuzzy logic. I st Embedded Computing Conference, Paris, 1996.
5.
Kumagai N.: In search of mechanism of wheel skid and wheel fiat occurrence. Japanese · Railway Engineering, 1992, nr 116, s. 16-20.
7.
Podolski J., Kacprzak J. , Mysłek J.: Zasady trakcji elektrycznej. WKŁ, Warsz awa, 1980.
8.
Rutkowska D., Piliński M., Rutkowski L.: Sieci neuronowe, algorytmy genetyczne i systemy rozmyte. PWN, Warszawa, 1997.
9.
Saumweber E.: Leistungsgrenzen kombinierter Bremssysteme. ZEV-Glas ., 1963, Ann. 98, 1974, nr 718, s. 259-265.
10.
Unsal C., Kachroo P.: (1999) Sliding mode measurement feedback control for antilock braking systems. IEEE Transactions on Control Systems Technology 1999, str. 271-281.
11.
Yager R.R, Filev D .P.: Podstawy modelowania sterowania rozmytego. WNT, Warszawa, 1995.
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.