Bieżący numer
Online first
Archiwum
O czasopiśmie
Zakres tematyczny czasopisma
Rada Programowa
Redakcja
Wydawca
Recenzenci
Ochrona danych osobowych
Polityka repozytorium
Kontakt
Polityka AI
Polityka Preprintów
Informacja dla autorów
Przygotowanie artykułu
Procedura recenzowania
Wytyczne dotyczące etyki publikowania
Polityka Crossmark
Ghostwriting i guest authorship
Prawa autorskie
Polityka Open Access
System antyplagiatowy
Program do badań układu sterująco – pomiarowego,
pracującego w sieci CANopen,
przeznaczonego do pojazdu szynowego
1
Instytut Pojazdów Szynowych „TABOR’
Data publikacji: 02-10-2008
Rail Vehicles/Pojazdy Szynowe 2008,4,14-18

STRESZCZENIE
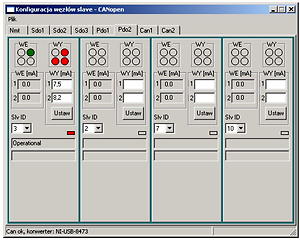
W artykule opisano program do badania układu sterująco – pomiarowego pracującego w
sieci CANopen. Wykorzystano do tego język programowania ogólnego (język C++). Przez
autorów artykułu zostały zrealizowane funkcje dotyczące sieci CANopen związane z
konfiguracją i monitorowaniem pracy w sieci oraz funkcje związane z uruchomieniem
programów badawczych. Przedstawiono przykład uruchamiania programu sterującego
hamulcem pneumatycznym pojazdu szynowego z wykorzystaniem 12 - pozycyjnego
zadajnika. Praca jest kontynuacją artykułu „Przyszłościowe współbieżne mikroprocesorowe
inteligentne systemy mechatroniczne w sterowaniu i diagnostyce pojazdów szynowych”
przedstawionego w czasopiśmie „Pojazdy Szynowe” 4/2007; 1/2008; 2/2008.
Artykuł powstał w wyniku realizacji projektu badawczego KBN 4T 12C 04929
pt.” Rozproszone współbieżne mikroprocesorowe inteligentne podsystemy mechatroniczne w
sterowaniu i diagnostyce pojazdów szynowych”.
REFERENCJE (5)
1.
Bocian S.: Przyszłościowe współbieżne mikroprocesorowe inteligentne systemy mechatroniczne w sterowaniu i diagnostyce pojazdów szynowych (1). Pojazdy Szynowe Nr 4/2007.
2.
Koncepcja układu do badania algorytmów sterujących w pojazdach szynowych. Opis układu sieciowego CANopen. Instytut Pojazdów Szynowych „Tabor” w Poznaniu, OR–9200.
3.
Koncepcja układu do badania algorytmów sterujących w pojazdach szynowych w oparciu o sieć CANopen. Program testowy algorytmów sterujących. Instytut Pojazdów Szynowych „Tabor” w Poznaniu, OR–9280.
4.
CANopen. Application Layer and Communication Profile. CiA Draft Standard 301. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, 2002, www.can-cia.org.
5.
CANopen. Device Profile for Generic I/O Modules. CiA Draft Standard 401. CAN in Automation, Am Weichselgarten 26, D-91058 Erlangen, Version 2.1, 2002, www.can-cia.org.
CYTOWANIA (1):
1.
Urządzenie symulujące pracę układu hamulcowego pojazdu szynowego
Stanisław Bocian, Jerzy Frączek, Mieczysław Stypka
Rail Vehicles
Stanisław Bocian, Jerzy Frączek, Mieczysław Stypka
Rail Vehicles
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.