Bieżący numer
Online first
Archiwum
O czasopiśmie
Zakres tematyczny czasopisma
Rada Programowa
Komitet Redakcjyjny
Wydawca
Recenzenci
Ochrona danych osobowych
Polityka repozytorium
Kontakt
Polityka AI
Polityka Preprintów
Informacja dla autorów
Przygotowanie artykułu
Procedura recenzowania
Wytyczne dotyczące etyki publikowania
Polityka Crossmark
Ghostwriting i guest authorship
Prawa autorskie
Polityka Open Access
System antyplagiatowy
Mikroprocesorowy układ wykrywania i likwidacji poślizgu przy hamowaniu
1
Instytut Pojazdów Szynowych ,,TABOR"
Data publikacji online: 02-11-2003
Data publikacji: 03-05-2025
Rail Vehicles/Pojazdy Szynowe 2003,4,48-52

STRESZCZENIE
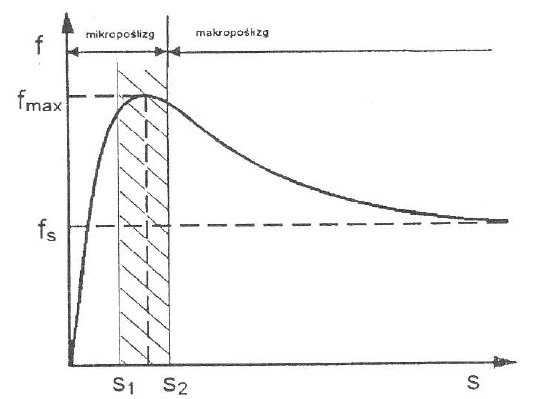
W artykule przedstawiono matematyczny model zestawu kołowego oraz omówiono zjawisko poślizgu przy hamowaniu. Przedstawiono budowę oraz działanie mikroprocesorowego układu wykrywania i likwidacji pośliagu kół przy hamowaniu. Omówiono sposób pomiaru prędkości obrotowej kół oraz sposób obliczania ich przyspieszeń. opisano zadania układu likwidacji poślizgu. Zaprezentowano wyniki symulacji działania układu.
REFERENCJE (15)
1.
Barna G. Założenia układu wykrywania i likwidacji poślizgu przy rozruchu i hamowaniu dla zmodernizowanej lokomotywy ET22, Poznań, 2000.
2.
Barna G. Układ sterowania rozmytego dla likwidacji poślizgu przy hamowaniu, XV Konferencja Naukowa ,,Poiazdy Szynowe", Szklarska Poręba, 4-7 września 2002 r.
3.
Barna G., Kaluba M. Matematyczny model pojazdu szynowego i jego zastosowanie do symulacji działania układu przeciwpoślizgowego. XV Konferencja Naukowa ,,Pojazdy Szynowe", Szklarska Poręba, 4-7 września 2002 r.
4.
Barna G., Stypka M. Dobór czujników prędkości dla układu likwidacji poślizgu. OR-8268 (opracowanie niepublikowane), IPS Poznań 2000.
5.
Caldara S., Garcia Rivera M., Poma G. Software implementation of an antiskidding control system for traction electrical drives based on fuzzy-identification techniques Symposium on Power Electronics, Industrial Drives, Power Quality, Traction Systems, Capri, l996, s. C3-19-C3-25.
6.
Gartner E.: Kraftschluss zwischen Rad und Schiene. Schienenfahrzeuge I976, nr 12, s. 417420.
8.
Klein R. Antilock-braking system and vehicle speed estimation using fuzzy logic 1st Embedded Computing Conference, Paris, ]996.
9.
Kumagai N. In search of mechanism of wheel skid and wheel flat occurrence Japanese Railway Engineering, 1992, nr 116, s. 16-20.
10.
Podolski J., Kacprzak J., Mysłek J.: Zasady trakcji elektrycznej WKŁ, Warszawa 19B0.
11.
Saumweber E. Leistutlgsgrenzen kombinierter Bremssysteme, ZEV,Glas., 1963, Ann. 98, 1974, nr 7/8, s. 259-265.
12.
Stypka M. Analiza cyfrowych układów pomiarowych i układów regulacji dla lokomotywy 104E, OR-6676 (opracowanie niepublikowane), IPS Poznań, 1983.
13.
Stypka M. Układy kontrolno-pomiarowe - analiza matemaryczna wybranych sygnałów prędkości, przyspieszenia i drogi, OR-754 (opracowanie niepublikowane),.
14.
Stypka M., Frączek J. Mikroprocesorowy układ pomiaru prędkości i przyspieszenia pojazdów trakcyjnych, X Konferencja Naukowa ,,Pojazdy Szynowe", Wrocław, 14-16 września 1994 r., tom 1.
15.
Yager R.R, Filev D.P. Podstawy modelowania i sterowania rozmytego. WNT, Warszawa 1995.
Udostępnij
| eISSN: | 2719-9630 |
| ISSN: | 0138-0370 |
Przetwarzamy dane osobowe zbierane podczas odwiedzania serwisu. Realizacja funkcji pozyskiwania informacji o użytkownikach i ich zachowaniu odbywa się poprzez dobrowolnie wprowadzone w formularzach informacje oraz zapisywanie w urządzeniach końcowych plików cookies (tzw. ciasteczka). Dane, w tym pliki cookies, wykorzystywane są w celu realizacji usług, zapewnienia wygodnego korzystania ze strony oraz w celu monitorowania ruchu zgodnie z Polityką prywatności. Dane są także zbierane i przetwarzane przez narzędzie Google Analytics (więcej).
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.
Możesz zmienić ustawienia cookies w swojej przeglądarce. Ograniczenie stosowania plików cookies w konfiguracji przeglądarki może wpłynąć na niektóre funkcjonalności dostępne na stronie.